
Page 374 - Mechatronics with Experiments
P. 374
JWST499-Cetinkunt
JWST499-c06
360 MECHATRONICS Printer: Yet to Come October 9, 2014 8:1 254mm×178mm
Receiver
No. of optical axes Optical resolution
n
n-1
Emitter Emitter Receiver
Protective height 2 1 Optical-axis pitch
Detection distance
Indicator area Optical-axis
line mark
FIGURE 6.32: A through-beam emitter–receiver array light sensor used as a safety light
curtain.
6.4.9 Presence Sensors: ON/OFF Sensors
A special class of the position related sensors are those which sense the presence of an
object with a sensing range and provide one of two discrete outputs: ON or OFF. Such
sensors are collectively called presence sensors or ON/OFF sensors.
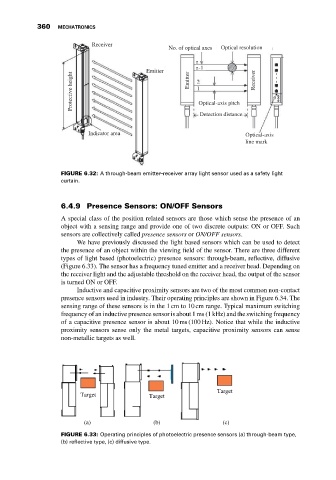
We have previously discussed the light based sensors which can be used to detect
the presence of an object within the viewing field of the sensor. There are three different
types of light based (photoelectric) presence sensors: through-beam, reflective, diffusive
(Figure 6.33). The sensor has a frequency tuned emitter and a receiver head. Depending on
the receiver light and the adjustable threshold on the receiver head, the output of the sensor
is turned ON or OFF.
Inductive and capacitive proximity sensors are two of the most common non-contact
presence sensors used in industry. Their operating principles are shown in Figure 6.34. The
sensing range of these sensors is in the 1 cm to 10 cm range. Typical maximum switching
frequency of an inductive presence sensor is about 1 ms (1 kHz) and the switching frequency
of a capacitive presence sensor is about 10 ms (100 Hz). Notice that while the inductive
proximity sensors sense only the metal targets, capacitive proximity sensors can sense
non-metallic targets as well.
Target
Target Target
(a) (b) (c)
FIGURE 6.33: Operating principles of photoelectric presence sensors (a) through-beam type,
(b) reflective type, (c) diffusive type.