
Page 84 - Mechatronics with Experiments
P. 84
70 MECHATRONICS
2.6 TRANSIENT RESPONSE SPECIFICATIONS: SELECTION
OF POLE LOCATIONS
The feedback control changes the dynamics of the open loop system to the desired form
by closed loop control action. For linear systems, closed loop control changes the locations
of the poles. The control effort required is proportional to the amount of movement of the
pole locations (the difference between the open loop and closed loop pole locations). Large
pole movements will require unnecessarily large actuators. The desired pole locations can
be selected to approximate the step response behavior of a dominant second-order model
or the pole locations of some standard filters such as Bessel and Butterworth filters. The
second-order system parameters ( , ) can be selected fairly accurately to satisfy t ,
n settling
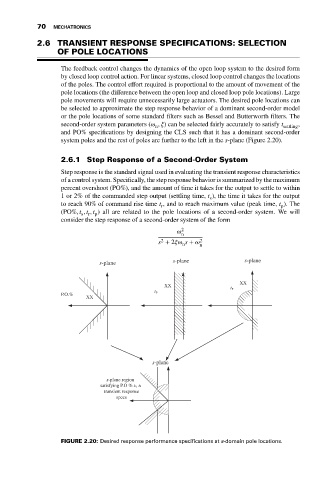
and PO% specifications by designing the CLS such that it has a dominant second-order
system poles and the rest of poles are further to the left in the s-plane (Figure 2.20).
2.6.1 Step Response of a Second-Order System
Step response is the standard signal used in evaluating the transient response characteristics
of a control system. Specifically, the step response behavior is summarized by the maximum
percent overshoot (PO%), and the amount of time it takes for the output to settle to within
1 or 2% of the commanded step output (settling time, t ), the time it takes for the output
s
to reach 90% of command rise time t , and to reach maximum value (peak time, t ). The
r
p
(PO%, t , t , t ) all are related to the pole locations of a second-order system. We will
s r p
consider the step response of a second-order system of the form
2
n
2
s + 2 s + 2 n
n
s-plane s-plane s-plane
XX
XX r t
ts
P.O.%
XX
s-plane
s-plane region
satisfying P.O % tr, ts
transient response
specs
FIGURE 2.20: Desired response performance specifications at s-domain pole locations.