
Page 104 - EMODUL TEKNIK KENDALI DIGITAL FT
P. 104
Universitas Negeri Makassar 91
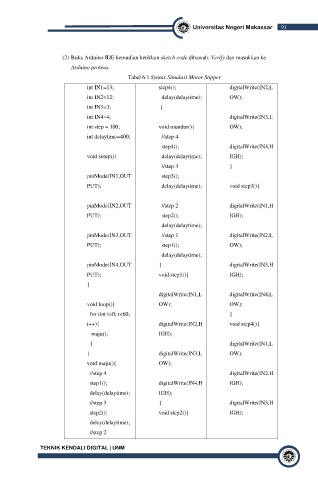
(2) Buka Arduino IDE kemudian ketikkan sketch code dibawah. Verify dan masukkan ke
Arduino proteus.
Tabel 6.1 Syntax Simulasi Motor Stipper
int IN1=13; step4(); digitalWrite(IN2,L
int IN2=12; delay(delaytime); OW);
int IN3=3; }
int IN4=4; digitalWrite(IN3,L
int step = 100; void mundur(){ OW);
int delaytime=400; //step 4
step4(); digitalWrite(IN4,H
void setup(){ delay(delaytime); IGH);
//step 3 }
pinMode(IN1,OUT step3();
PUT); delay(delaytime); void step3(){
pinMode(IN2,OUT //step 2 digitalWrite(IN1,H
PUT); step2(); IGH);
delay(delaytime);
pinMode(IN3,OUT //step 1 digitalWrite(IN2,L
PUT); step1(); OW);
delay(delaytime);
pinMode(IN4,OUT } digitalWrite(IN3,H
PUT); void step1(){ IGH);
}
digitalWrite(IN1,L digitalWrite(IN4,L
void loop(){ OW); OW);
for (int i=0; i<60; }
i++){ digitalWrite(IN2,H void step4(){
maju(); IGH);
} digitalWrite(IN1,L
} digitalWrite(IN3,L OW);
void maju(){ OW);
//step 4 digitalWrite(IN2,H
step1(); digitalWrite(IN4,H IGH);
delay(delaytime); IGH);
//step 3 } digitalWrite(IN3,H
step2(); void step2(){ IGH);
delay(delaytime);
//step 2
TEKNIK KENDALI DIGITAL | UNM