
Page 137 - 978-620-0-64375-9_Classical
P. 137
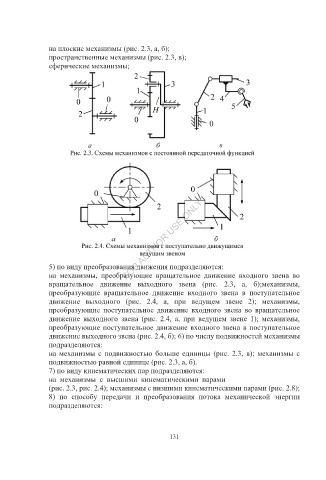
на плоские механизмы (рис. 2.3, а, б);
пространственные механизмы (рис. 2.3, в);
сферические механизмы;
5) по виду преобразования движения подразделяются:
на механизмы, преобразующие вращательное движение входного звена во
вращательное движение выходного звена (рис. 2.3, а, б);механизмы,
преобразующие вращательное движение входного звена в поступательное
движение выходного (рис. 2.4, а, при ведущем звене 2); механизмы,
преобразующие поступательное движение входного звена во вращательное
движение выходного звена (рис. 2.4, а, при ведущем звене 1); механизмы,
преобразующие поступательное движение входного звена в поступательное
движение выходного звена (рис. 2.4, б); 6) по числу подвижностей механизмы
подразделяются:
на механизмы с подвижностью больше единицы (рис. 2.3, в); механизмы с
подвижностью равной единице (рис. 2.3, а, б).
7) по виду кинематических пар подразделяются:
на механизмы с высшими кинематическими парами
(рис. 2.3, рис. 2.4); механизмы с низшими кинематическими парами (рис. 2.8);
8) по способу передачи и преобразования потока механической энергии
подразделяются:
131