
Page 141 - 978-620-0-64375-9_Classical
P. 141
пары, в которых постоянство контакта звеньев обеспечивается за счет
действия сил тяжести или силы упругости пружины);
геометрические кинематические пары (кинематические пары, в которых
постоянство контакта звеньев реализуется за счет конструкции рабочих
поверхностей звеньев);
4) по числу условий связи, накладываемых на относительное движение
звеньев, образующих кинематическую пару (число условий связи определяет
класс кинематической пары);
5) по числу подвижностей в относительном движении звеньев (число
подвижностей определяет подвижность кинематической пары).
Рассмотрим более подробно два последних признака классификации
кинематических пар.
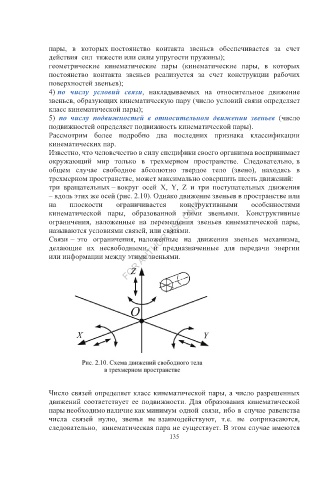
Известно, что человечество в силу специфики своего организма воспринимает
окружающий мир только в трехмерном пространстве. Следовательно, в
общем случае свободное абсолютно твердое тело (звено), находясь в
трехмерном пространстве, может максимально совершить шесть движений:
три вращательных – вокруг осей X, Y, Z и три поступательных движения
– вдоль этих же осей (рис. 2.10). Однако движение звеньев в пространстве или
на плоскости ограничивается конструктивными особенностями
кинематической пары, образованной этими звеньями. Конструктивные
ограничения, наложенные на перемещения звеньев кинематической пары,
называются условиями связей, или связями.
Связи – это ограничения, наложенные на движения звеньев механизма,
делающие их несвободными, и предназначенные для передачи энергии
или информации между этими звеньями.
Число связей определяет класс кинематической пары, а число разрешенных
движений соответствует ее подвижности. Для образования кинематической
пары необходимо наличие как минимум одной связи, ибо в случае равенства
числа связей нулю, звенья не взаимодействуют, т.е. не соприкасаются,
следовательно, кинематическая пара не существует. В этом случае имеются
135