
Page 989 - Kitab3DsMax
P. 989
Chapter 38: Working with Inverse Kinematics
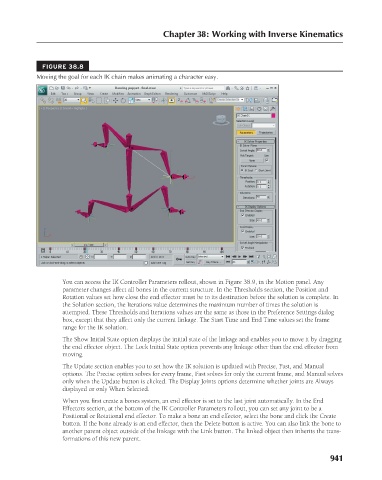
FIGURE 38.8
Moving the goal for each IK chain makes animating a character easy.
You can access the IK Controller Parameters rollout, shown in Figure 38.9, in the Motion panel. Any
parameter changes affect all bones in the current structure. In the Thresholds section, the Position and
Rotation values set how close the end effector must be to its destination before the solution is complete. In
the Solution section, the Iterations value determines the maximum number of times the solution is
attempted. These Thresholds and Iterations values are the same as those in the Preference Settings dialog
box, except that they affect only the current linkage. The Start Time and End Time values set the frame
range for the IK solution.
The Show Initial State option displays the initial state of the linkage and enables you to move it by dragging
the end effector object. The Lock Initial State option prevents any linkage other than the end effector from
moving.
The Update section enables you to set how the IK solution is updated with Precise, Fast, and Manual
options. The Precise option solves for every frame, Fast solves for only the current frame, and Manual solves
only when the Update button is clicked. The Display Joints options determine whether joints are Always
displayed or only When Selected.
When you first create a bones system, an end effector is set to the last joint automatically. In the End
Effectors section, at the bottom of the IK Controller Parameters rollout, you can set any joint to be a
Positional or Rotational end effector. To make a bone an end effector, select the bone and click the Create
button. If the bone already is an end effector, then the Delete button is active. You can also link the bone to
another parent object outside of the linkage with the Link button. The linked object then inherits the trans-
formations of this new parent.
941