
Page 41 - คู่มือหลักสูตรสาขาวิชาแมคคาทรอนิกส์ และคลัสเตอร์หุ่นยนต์
P. 41
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
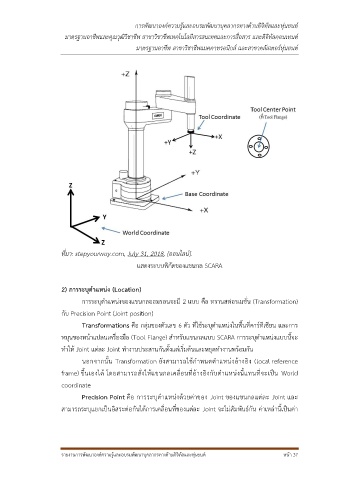
ที่มา: stepyourway.com, July 31, 2018, [ออนไลน์].
แสดงระบบพิกัดของแขนกล SCARA
2) การระบุต าแหน่ง (Location)
การระบุต าแหน่งของแขนกลออมรอนจะมี 2 แบบ คือ ทรานสฟอรเมชั่น (Transformation)
กับ Precision Point (Joint position)
Transformations คือ กลุ่มของตัวเลข 6 ตัว ที่ใช้ระบุต าแหน่งในพื้นที่คาร์ทีเซียน และการ
หมุนของหน้าแปลนเครื่องมือ (Tool Flange) ส าหรับแขนกลแบบ SCARA การระบุต าแหน่งแบบนี้จะ
ท าให้ Joint แต่ละ Joint ท างานประสานกันตั้งแต่เริ่มต้นและหยุดท างานพร้อมกัน
นอกจากนั้น Transformation ยังสามารถใช้ก าหนดต าแหน่งอ้างอิง (local reference
frame) ขึ้นเองได้ โดยสามารถสั่งให้แขนกลเคลื่อนที่อ้างอิงกับต าแหน่งนี้แทนที่จะเป็น World
coordinate
Precision Point คือ การระบุต าแหน่งด้วยค่าของ Joint ของแขนกลแต่ละ Joint และ
สามารถระบุแยกเป็นอิสระต่อกันได้การเคลื่อนที่ของแต่ละ Joint จะไม่สัมพันธ์กัน ค่าเหล่านี้เป็นค่า
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 37