
Page 42 - คู่มือหลักสูตรสาขาวิชาแมคคาทรอนิกส์ และคลัสเตอร์หุ่นยนต์
P. 42
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
สัมบูรณ์ (Absolute) ที่อ้างอิงจากเซ็นเซอร์ Home ของแขนกล และไม่สามารถอ้างอิงเชิง
เปรียบเทียบกับต าแหน่งอื่น ๆ ได้
3) ทรานสฟอรเมชั่น (Transformation)
ทรานสฟอรเมชั่นจะเก็บอยู่ในรูปของตัวแปร (Variable) โดยองค์ประกอบส่วนแรกมีตัวเลข 3 ตัว
จะเป็นค่าของแกน X, Y, และ Z ในกรณีแขนกล SCARA รุ่น eCobra จุด Origin ของพื้นที่คาร์ทีเซียน
จะอยู่ที่ฐานของแขนกล
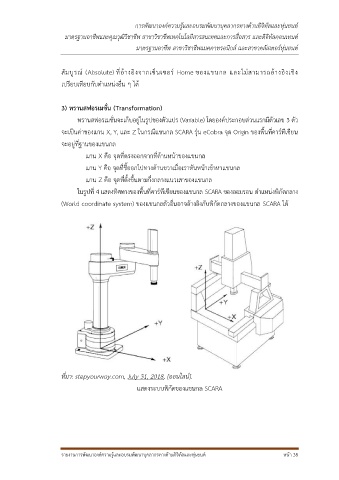
แกน X คือ จุดที่ตรงออกจากที่ด้านหน้าของแขนกล
แกน Y คือ จุดที่ชี้ออกไปทางด้านขวาเมื่อเราหันหน้าเข้าหาแขนกล
แกน Z คือ จุดที่ตั้งขึ้นตามกึ่งกลางแนวเสาของแขนกล
ในรูปที่ 4 แสดงทิศทางของพื้นที่คาร์ทีเซียนของแขนกล SCARA ของออมรอน ต าแหน่งพิกัดกลาง
(World coordinate system) ของแขนกลตัวอื่นอาจอ้างอิงกับพิกัดกลางของแขนกล SCARA ได้
ที่มา: stepyourway.com, July 31, 2018, [ออนไลน์].
แสดงระบบพิกัดของแขนกล SCARA
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 38