
Page 44 - คู่มือหลักสูตรสาขาวิชาแมคคาทรอนิกส์ และคลัสเตอร์หุ่นยนต์
P. 44
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
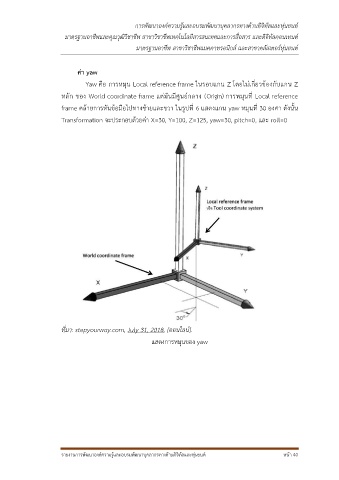
ค่า yaw
Yaw คือ การหมุน Local reference frame ในรอบแกน Z โดยไม่เกี่ยวข้องกับแกน Z
หลัก ของ World coordinate frame แต่มันมีศูนย์กลาง (Origin) การหมุนที่ Local reference
frame คล้ายการหันข้อมือไปทางซ้ายและขวา ในรูปที่ 6 แสดงแกน yaw หมุนที่ 30 องศา ดังนั้น
Transformation จะประกอบด้วยค่า X=30, Y=100, Z=125, yaw=30, pitch=0, และ roll=0
ที่มา: stepyourway.com, July 31, 2018, [ออนไลน์].
แสดงการหมุนของ yaw
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 40