
Page 45 - คู่มือหลักสูตรสาขาวิชาแมคคาทรอนิกส์ และคลัสเตอร์หุ่นยนต์
P. 45
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
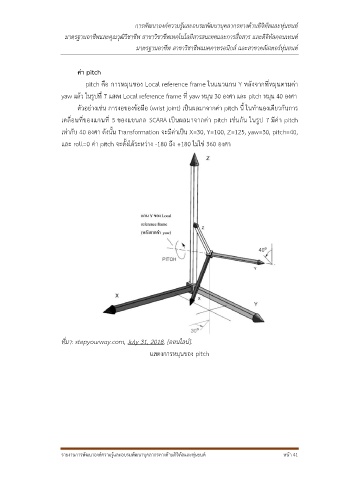
ค่า pitch
pitch คือ การหมุนของ Local reference frame ในแนวแกน Y หลังจากที่หมุนตามค่า
yaw แล้ว ในรูปที่ 7 แสดง Local reference frame ที่ yaw หมุน 30 องศา และ pitch หมุน 40 องศา
ตัวอย่างเช่น การงอของข้อมือ (wrist joint) เป็นผลมาจากค่า pitch นี้ ในท านองเดียวกันการ
เคลื่อนที่ของแกนที่ 5 ของแขนกล SCARA เป็นผลมาจากค่า pitch เช่นกัน ในรูป 7 มีค่า pitch
เท่ากับ 40 องศา ดังนั้น Transformation จะมีค่าเป็น X=30, Y=100, Z=125, yaw=30, pitch=40,
และ roll=0 ค่า pitch จะตั้งได้ระหว่าง -180 ถึง +180 ไม่ใช่ 360 องศา
ที่มา: stepyourway.com, July 31, 2018, [ออนไลน์].
แสดงการหมุนของ pitch
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 41