
Page 45 - sadasd
P. 45
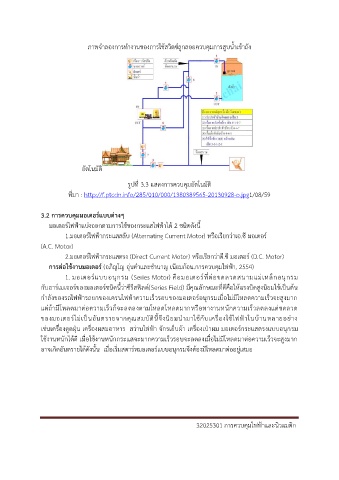
ภาพจ าลองการท างานของการใช้สวิตซ์ลูกลอยควบคุมการสูบน้ าเข้าถัง
อัตโนมัติ
รูปที่ 3.3 แสดงการควบคุมอัตโนมัติ
ที่มา : http://f.ptcdn.info/285/010/000/1380389565-20130928-o.jpg1/08/59
3.2 กำรควบคุมมอเตอร์แบบต่ำงๆ
มอเตอร์ไฟฟ้าแบ่งออกตามการใช้ของกระแสไฟฟ้าได้ 2 ชนิดดังนี้
1.มอเตอร์ไฟฟ้ากระแสสลับ (Alternating Current Motor) หรือเรียกว่าเอ.ซี มอเตอร์
(A.C. Motor)
2.มอเตอร์ไฟฟ้ากระแสตรง (Direct Current Motor) หรือเรียกว่าดี.ซี มอเตอร์ (D.C. Motor)
กำรต่อใช้งำนมอเตอร์ (อภิญโญ อุ่นค าและช านาญ เนียมก้อน.การควบคุมไฟฟ้า, 2554)
1. มอเตอร์แบบอนุกรม (Series Motor) คอมอเตอร์ที่ต่อขดลวดสนามแม่เหล็กอนุกรม
ื
ื
้
กับอาร์เมเจอร์ของมอเตอร์ชนิดนวาซีรีสฟิลด์(Series Field) มีคุณลักษณะที่ดีคอให้แรงบิดสูงนิยมใชเป็นต้น
่
ี้
ก าลังของรถไฟฟ้ารถยกของเครนไฟฟ้าความเร็วรอบของมอเตอร์อนุกรมเมื่อไม่มีโหลดความเร็วจะสูงมาก
้
แต่ถามีโหลดมาต่อความเร็วก็จะลดลงตามโหลดโหลดมากหรือทางานหนักความเร็วลดลงแต่ขดลวด
ุ
้
ของมอเตอร์ไม่เป็นอันตรายจากคณสมบัตินี้จึงนิยมน ามาใชกับเครื่องใชไฟฟ้าในบ้านหลายอย่าง
้
เชนเครื่องดูดฝุ่น เครื่องผสมอาหาร สว่านไฟฟ้า จักรเย็บผ้า เครื่องเป่าผม มอเตอร์กระแสตรงแบบอนุกรม
่
ใชงานหนักได้ดี เมื่อใชงานหนักกระแสจะมากความเร็วรอบจะลดลงเมื่อไม่มีโหลดมาต่อความเร็วจะสูงมาก
้
้
อาจเกิดอันตรายได้ดังนั้น เมื่อเริ่มสตาร์ทมอเตอร์แบบอนุกรมจึงต้องมีโหลดมาต่ออยู่เสมอ
32025301 การควบคุมไฟฟ้าและนิวแมติก