
Page 184 - Mechatronics with Experiments
P. 184
170 MECHATRONICS
z z z
y y y
x x x
z z z
y y y
x x
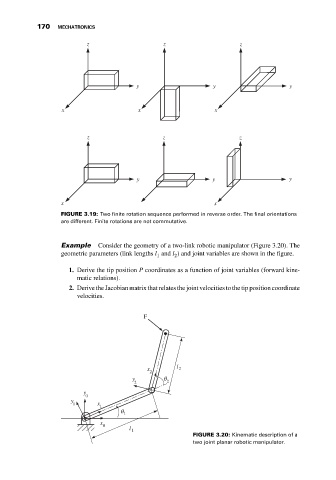
FIGURE 3.19: Two finite rotation sequence performed in reverse order. The final orientations
are different. Finite rotations are not commutative.
Example Consider the geometry of a two-link robotic manipulator (Figure 3.20). The
geometric parameters (link lengths l and l ) and joint variables are shown in the figure.
1 2
1. Derive the tip position P coordinates as a function of joint variables (forward kine-
matic relations).
2. Derive the Jacobian matrix that relates the joint velocities to the tip position coordinate
velocities.
F
x l 2
2
y θ
2 2
y
0
y
1 x
1
θ 1
x
0
l
1
FIGURE 3.20: Kinematic description of a
two joint planar robotic manipulator.