
Page 233 - Mechatronics with Experiments
P. 233
MICROCONTROLLERS 219
Microcontroller
Microprocessor Memory I/O peripherals
Program counter ROM Digital I/O
Instruction decoder
Flash RAM ADC
ALU
EPROM DAC / PWM
Accumulator A
EEPROM Timers
Accumulator B
UART/USART
(a)
Microcontroller
Registers for inputs: CPU Registers for outputs:
Memory
- Setup - Setup
- Status/control Clock - Status/control
- Read/write - Read/write
(b)
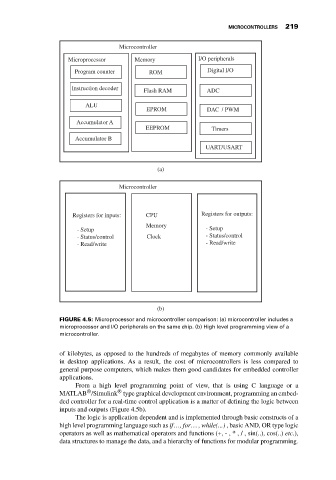
FIGURE 4.5: Microprocessor and microcontroller comparison: (a) microcontroller includes a
microprocessor and I/O peripherals on the same chip. (b) High level programming view of a
microcontroller.
of kilobytes, as opposed to the hundreds of megabytes of memory commonly available
in desktop applications. As a result, the cost of microcontrollers is less compared to
general purpose computers, which makes them good candidates for embedded controller
applications.
From a high level programming point of view, that is using C language or a
®
®
MATLAB /Simulink type graphical development environment, programming an embed-
ded controller for a real-time control application is a matter of defining the logic between
inputs and outputs (Figure 4.5b).
The logic is application dependent and is implemented through basic constructs of a
high level programming language such as if…,for… , while(...) , basic AND, OR type logic
operators as well as mathematical operators and functions (+, - , * , / , sin(..), cos(..) etc.),
data structures to manage the data, and a hierarchy of functions for modular programming.