
Page 816 - Mechatronics with Experiments
P. 816
802 MECHATRONICS
else if (Channel_A == OFF && Channel_B == OFF)
Position = Position + 1 ;
else if (Channel_A == ON && Channel_B == OFF)
Position = Position - 1 ;
else if (Channel_A == OFF && Channel_B == ON)
Position = Position - 1 ;
endif
}
Application Software Description
In most microcontrollers for motion control applications, there is a dedicated chip to
interface to the encoder and count the position change pulses as well as calculate the speed.
However, in the PIC 18F452 microcontroller we have used so far, such a peripheral is not
available, whereas PIC 18F4431 does have an incremental encoder interface peripheral. For
PIC 18F452, we can implement the incremental encoder interface using discrete input lines.
We can either connect the two opto-interrupter signals to two digital inputs and sample them
fast enough so that we do not lose any pulse, or we can connect them to hardware interrupt
lines. In the latter case, everytime a pulse transition occurs, an interrupt is generated. At the
9 V
9 V
1 kΩ
PWM 0 O/P
PORT B, Pin 0 1 kΩ
Opto#2 I/P
QEA, PORT A, Pin 3
IN4003 IN4003
PIC 18F4331
1 kΩ
PWM 1 O/P Encoder
PORT B, Pin 1 1 kΩ
IN4003
Opto#1 I/P IN4003
QEB, PORT A, Pin 4
Opto #1 signal Opto #2 signal
Optointerrupter
+ 5 V + 5 V + 5 V + 5 V
circuit
100 Ω 100 Ω
+ +
+ +
To Microcontroller To Microcontroller
D D
E E
100 kΩ 100 kΩ
90 degrees phase shift
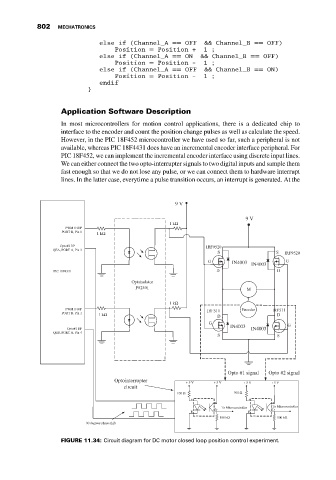
FIGURE 11.34: Circuit diagram for DC motor closed loop position control experiment.