
Page 202 - Servo Motors and Industrial Control Theory -
P. 202
Appendix B 199
find the range of the proportional gain that is effective in control of the eigen-
values. It might be in the range of smaller than one, greater than one, thousands
or millions. With a few trials you should be able to find the interesting ranges.
Plot the root locus as gain changes. Select quite a large gain and introduce the
derivative gain for each of the values of gain. The derivative term must increase
the damping of some of the eigenvalues. Therefore, you should be able to find
a trend when both the proportional gain and derivative gains are changed. Add
the integral term and change its value for several values of proportional and
derivative gain. Observe the root locus and find the most suitable parameters
of PID gains. For the best performance, you should consider the transient re-
sponse, steady state error for step input and speed of response. You should
compare the complexity of such a system when solved with classical feedback
control theory or with state space approach.
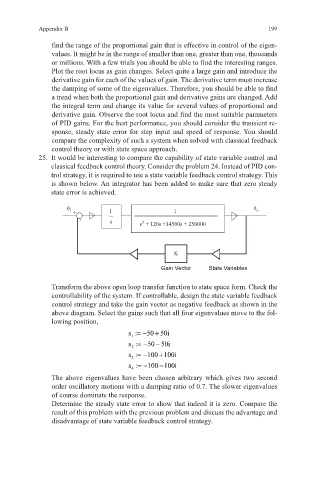
25. It would be interesting to compare the capability of state variable control and
classical feedback control theory. Consider the problem 24. Instead of PID con-
trol strategy, it is required to use a state variable feedback control strategy. This
is shown below. An integrator has been added to make sure that zero steady
state error is achieved.
θ i + 1 1 θ o
- s s + 120s +14500s + 250000
3
K
Gain Vector State Variables
Transform the above open loop transfer function to state space form. Check the
controllability of the system. If controllable, design the state variable feedback
control strategy and take the gain vector as negative feedback as shown in the
above diagram. Select the gains such that all four eigenvalues move to the fol-
lowing position,
s :=− 50 50i+
1
s :=− 50 50i−
2
s :=− 100 100i+
3
s :=− 100 100i−
4
The above eigenvalues have been chosen arbitrary which gives two second
order oscillatory motions with a damping ratio of 0.7. The slower eigenvalues
of course dominate the response.
Determine the steady state error to show that indeed it is zero. Compare the
result of this problem with the previous problem and discuss the advantage and
disadvantage of state variable feedback control strategy.