
Page 4 - compasul giroscopic
P. 4
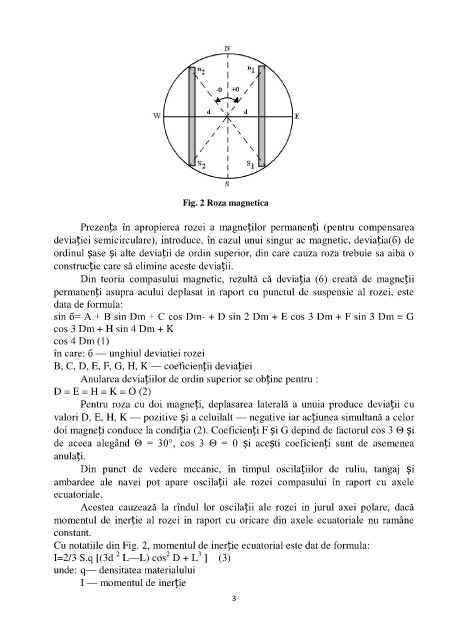
Fig. 2 Roza magnetica
Prezența în apropierea rozei a magneților permanenți (pentru compensarea
deviației semicirculare), introduce, în cazul unui singur ac magnetic, deviația(б) de
ordinul șase și alte deviații de ordin superior, din care cauza roza trebuie sa aiba o
construcție care să elimine aceste deviații.
Din teoria compasului magnetic, rezultă că deviația (6) creată de magneții
permanenți asupra acului deplasat in raport cu punctul de suspensie al rozei, este
data de formula:
sin б= A + B sin Dm + C cos Dm- + D sin 2 Dm + E cos 3 Dm + F sin 3 Dm = G
cos 3 Dm + H sin 4 Dm + K
cos 4 Dm (1)
în care: б — unghiul deviatiei rozei
B, C, D, E, F, G, H, K — coeficienții deviației
Anularea deviațiilor de ordin superior se obține pentru :
D = E = H = K = O (2)
Pentru roza cu doi magneți, deplasarea laterală a unuia produce deviații cu
valori D, E, H, K — pozitive și a celuilalt — negative iar acțiunea simultană a celor
doi magneți conduce la condiția (2). Coeficienți F și G depind de factorul cos 3 Θ și
de aceea alegând Θ = 30°, cos 3 Θ = 0 și acești coeficienți sunt de asemenea
anulați.
Din punct de vedere mecanic, în timpul oscilațiilor de ruliu, tangaj și
ambardee ale navei pot apare oscilații ale rozei compasului în raport cu axele
ecuatoriale.
Acestea cauzează la rîndul lor oscilații ale rozei in jurul axei polare, dacă
momentul de inerție al rozei in raport cu oricare din axele ecuatoriale nu ramâne
constant.
Cu notatiile din Fig. 2, momentul de inerție ecuatorial este dat de formula:
3
2
2
I=2/3 S.q [(3d L—L) cos D + L ] (3)
unde: q— densitatea materialului
I — momentul de inerție
3