
Page 101 - MODUL DARING SISTEM PENGATURAN_Neat
P. 101
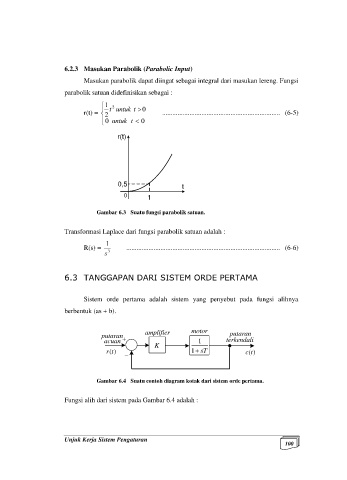
6.2.3 Masukan Parabolik (Parabolic Input)
Masukan parabolik dapat diingat sebagai integral dari masukan lereng. Fungsi
parabolik satuan didefinisikan sebagai :
1 2
r(t) = t untuk t 0 ..................................................................... (6-5)
2
0 untuk t 0
r(t)
0,5 t
0
1
Gambar 6.3 Suatu fungsi parabolik satuan.
Transformasi Laplace dari fungsi parabolik satuan adalah :
1
R(s) = .......................................................................................... (6-6)
s 3
6.3 TANGGAPAN DARI SISTEM ORDE PERTAMA
Sistem orde pertama adalah sistem yang penyebut pada fungsi alihnya
berbentuk (as + b).
putaran amplifier motor putaran
acuan + 1 terkendali
K
r (t ) 1 + sT c (t )
−
Gambar 6.4 Suatu contoh diagram kotak dari sistem orde pertama.
Fungsi alih dari sistem pada Gambar 6.4 adalah :
Unjuk Kerja Sistem Pengaturan
100