
Page 161 - sadasd
P. 161
6.1) Measuring Device หมายถึง เป็นอุปกรณ์ที่ให้สัญญาณขาออก ซึ่งมีความสัมพันธ์กับขนาด
ของตัวแปลทางฟิสิกส์ ของสิ่งที่เรามีความต้องการวัดหรือต้องการที่จะสั่งงาน
ุ
ึ
6.2) Controller หมายถง สิ่งที่ท าหน้าที่ออกคาสั่งหรือก าเนิดสัญญาณในการควบคม
ุ
ั่
ุ
้
ตามกฎเกณฑ์ของการควบคมที่ก าหนดไวล่วงหน้า คาสั่งหรือสัญญาณควบคมนี้อาจจะเป็นฟังก์ชนกับเวลา
หรือฟังก์ชั่นสัญญาณขาเข้าที่ได้รับจากอุปกรณ์วัด
์
ึ
6.3) Final Control Element หมายถง เป็นอุปกรณที่ท าหน้าที่ปรับสภาวะของโปรเซส
ุ
ุ
ด้วยการเปลี่ยนแปลงคาของตัวแปลปรับตัวโปรเซสในการควบคมส่วนใหญ่ คาสั่งหรือสัญญาณ ควบคม
่
จะมีขนาดหรือมีแรงดันน้อยๆ ส่วนตัวแปลปรับโปรเซสจะมีขนาดหรือพลังงานมาก
ุ
6.4) Process หมายถง กระบวนการทางฟิสิกส์ที่เราต้องการควบคมให้มีสภาวะตามต้องการ
ึ
ขณะที่สภาวะการท างานหรือสภาวะแวดล้อมที่อาจจะมีการเปลี่ยนแปลงอยู่ตลอดเวลา
ี
ั
7) ประเภทของกำรควบคม (ดวงเด่น สามนาคและวรภทร ปริชมน.โปรแกรมเมเบิ้ลคอนโทรลเลอร์,
ุ
2554)
กฎเกณฑ์ในการจ าแนกประเภทของการควบคุมมีหลายกฎเกณฑ์ซึ่งอาจแบ่งออกได้ตามลักษณะงาน
่
ตามลักษณะสมบัติของคาเป้าหมาย ฯลฯ เพราะฉะนั้นจึงเป็นการยากที่จะกล่าวอย่างแน่นอนตายตัว
ว่าการควบคุมมีกี่ประเภท
ุ
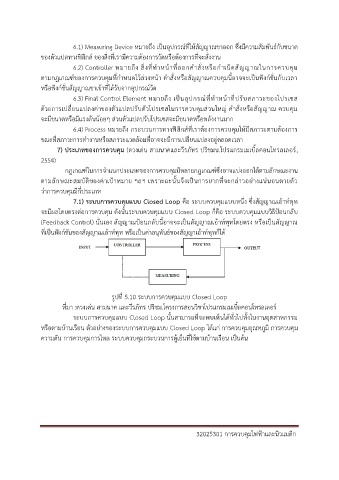
7.1) ระบบกำรควบคมแบบ Closed Loop คือ ระบบควบคุมแบบหนึ่ง ซึ่งสัญญาณเอ้าท์พุท
จะมีผลโดยตรงต่อการควบคุม ดังนั้นระบบควบคมแบบ Closed Loop ก็คือ ระบบควบคมแบบวิธป้อนกลับ
ี
ุ
ุ
(Feedback Control) นั่นเอง สัญญาณป้อนกลับนี้อาจจะเป็นสัญญาณเอ้าท์พุทโดยตรง หรือเป็นสัญญาณ
ที่เป็นฟังก์ชันของสัญญาณเอ้าท์พุท หรือเป็นค่าอนุพันธ์ของสัญญาเอ้าท์พุทก็ได้
รูปที่ 5.10 ระบบการควบคุมแบบ Closed Loop
ที่มา :ดวงเด่น สามนาค และวรภัทร ปริชม.โครงการสอนวิชาโปรแกรมเมเบิ้ลคอนโทรลเลอร์
ี
ระบบการควบคมแบบ Closed Loop นั้นสามารถที่จะพบเห็นได้ทั่วไปทั้งในงานอุตสาหกรรม
ุ
หรือตามบ้านเรือน ตัวอย่างของระบบการควบคุมแบบ Closed Loop ได้แก่ การควบคุมอุณหภูมิ การควบคุม
ความดัน การควบคุมการไหล ระบบควบคุมกระบวนการตู้เย็นที่ใช้ตามบ้านเรือน เป็นต้น
32025301 การควบคุมไฟฟ้าและนิวแมติก