
Page 79 - sadasd
P. 79
หน่วยที่ 3
การควบคุมมอเตอร์
บทน ำ
ุ
้
ึ
การควบคมมอเตอร์สองความเร็วแบบดาห์หลานเดอร์นั้น นักศกษาต้องรู้หลักการเขาใจการ างาน
้
ั
ของวงจรของมอเตอร์ท างานเรียงล าดบ การเปลี่ยนแปลงระดับความเร็วรอบของมอเตอร์ และการต่อใชงาน
ี
ิ
ิ
้
โดยมีหลากหลายวธในการใชงานนั้นๆ เพื่อจะที่จะสั่งให้มอเตอร์ท างานตามเงื่อนไขตามผู้ปฎบัติงาน
เป็นคนก าหนด
3.2.5 กำรควบคุมมอเตอร์สองควำมเร็วแบบดำห์หลำนเดอร์ (อ านาจ ทองผาสุกและวิทยา ประยงค ์
พันธุ์.การควบคุมมอเตอร์)
ุ
้
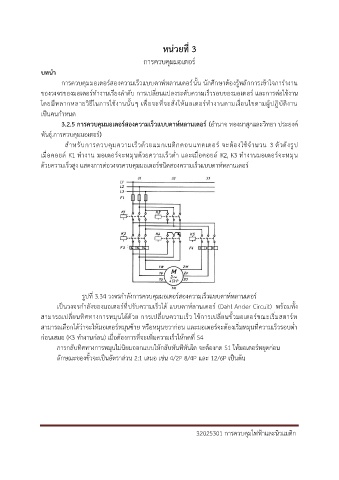
ส าหรับการควบคมความเร็วด้วยแมกเนติกคอนแทคเตอร์ จะต้องใชจ านวน 3 ตัวดังรูป
เมื่อคอยล์ K1 ท างาน มอเตอร์จะหมุนด้วยความเร็วต่ า และเมื่อคอยล์ K2, K3 ท างานมอเตอร์จะหมุน
ด้วยความเร็วสูง แสดงการต่อวงจรควบคุมมอเตอร์ชนิดสองความเร็วแบบดาห์หลานเดอร์
ุ
รูปที่ 3.34 วงจรก าลังการควบคมมอเตอร์สองความเร็วแบบดาห์หลานเดอร์
เป็นวงจรก าลังของมอเตอร์ที่ปรับความเร็วได้ แบบดาห์ลานเดอร์ (Dahl Ander Circuit) พร้อมทั้ง
ั้
้
สามารถเปลี่ยนทิศทางการหมุนได้ด้วย การเปลี่ยนความเร็ว ใชการเปลี่ยนขวมอเตอร์ขณะเริ่มสตาร์ท
สามารถเลือกได้ว่าจะให้มอเตอร์หมุนซ้าย หรือหมุนขวาก่อน และมอเตอร์จะต้องเริ่มหมุนที่ความเร็วรอบต่ า
ก่อนเสมอ (K3 ท างานก่อน) เมื่อต้องการที่จะเพิ่มความเร็วให้กดที่ S4
การกลับทิศทางการหมุนไม่นิยมออกแบบให้กลับทันทีทันใด จะต้องกด S1 ให้มอเตอร์หยุดก่อน
ั้
ลักษณะของขวจะเป็นอัตราส่วน 2:1 เสมอ เช่น 4/2P 8/4P และ 12/6P เป็นต้น
32025301 การควบคุมไฟฟ้าและนิวแมติก