
Page 87 - sadasd
P. 87
หน่วยที่ 3
การควบคุมมอเตอร์
บทน ำ
การควบคุมมอเตอร์แบบวาวด์โรเตอร์โดยต่อตัวต้านทานอนุกรมเข้ากับโรเตอร์ นั้นนักศึกษาต้องรู้
หลักการเข้าใจการ างานของวงจรของมอเตอร์ แบบต่างๆ การปรับเพิ่มหรือลดความต้านทานของรีโอสตา
ทส่วนต่างๆโดยมีผลต่อความเร็วมอเตอร์มีหลากหลายวิธีในการใช้งานนั้นๆ เพื่อจะที่จะสั่งให้มอเตอร์ท างาน
ตามเงื่อนไขตามผู้ปฎิบัติงานเป็นคนก าหนด
3.3 กำรควบคุมมอเตอร์แบบอัตโนมัติ
3.3.1 กำรควบคุมมอเตอร์แบบวำวด์โรเตอร์โดยต่อตัวต้ำนทำนอนกรมเข้ำกับโรเตอร์
ุ
(ไวพจน์ ศรีธัญ.การควบคมมอเตอร์ไฟฟ้า 2556)
ุ
มอเตอร์แบบนี้ออกแบบมาเพื่อให้มีแรงบิดเริ่มเดินมีค่าสูง (High Starting Torque) สูงกว่ามอเตอร์
แบบวาวด์โรเตอร์กรงกระรอก โดยการน าความต้านทานภายนอก ที่เรียกวาสตาร์ติ้งรีโอสตาท (Starting
่
Rheostat) แบบปรับค่าได้ต่อแบบสตาร์ น ามาต่อเข้ากับวงจรของโรเตอร์โดยผ่านชุดสลิป – ริง และแปรงถ่าน
(Brush) ซึ่งจะท าให้อิมพีแดนซ์ (Impedance) ของโรเตอร์มีค่าเพิ่มขึ้นกระแสขณะเริ่มเดินจึงมีค่าต่ า ในตอน
้
เริ่มต้นจะต้องปรับรีโอสตาทไวในต าแหน่งที่มีความต้านทานสูงสุด จากนั้นจึงค่อยจ่ายไฟฟ้าให้กับขดลวดสเต
เตอร์ เมื่อมอเตอร์เริ่มหมุนและมีความเร็วเพิ่มขึ้นคอย ๆ ลดความต้านทานออกจากวงจรของขดลวดโรเตอร์
่
จนกระทั่งอยู่ในต าแหน่งลัดวงจรรีโอสตาท ขณะนี้มอเตอร์จะหมุนด้วยความเร็วเต็มพิกัด
้
การปรับความเร็วรอบของมอเตอร์แบบนี้ ท าได้โดยการเพิ่มหรือลดความต้านทานของรีโอสตาท ถา
ุ
่
เพิ่มความต้านทานจะท าให้ความเร็วรอบลดต่ ากวาพิกัด แต่การควบคมความเร็วแบบนี้จะเกิดการสูญเสีย
(Power Loess) ที่ความต้านทาน ท าให้ประสิทธิภาพ (Efficiency) ของมอเตอร์ลดลง
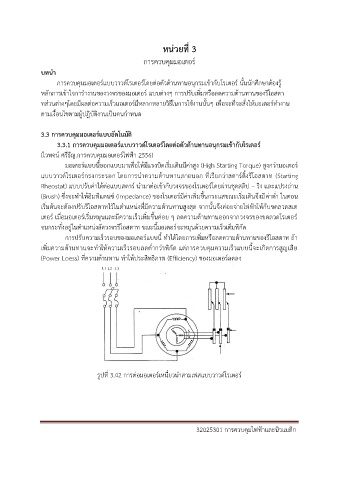
รูปที่ 3.42 การต่อมอเตอร์เหนี่ยวน าสามเฟสแบบวาวด์โรเตอร์
32025301 การควบคุมไฟฟ้าและนิวแมติก