
Page 3 - Estructura del helicóptero
P. 3
modernos usan una combinación de de la pala. Los amortiguadores se
ingeniería de estos tipos. El sistemas utilizan generalmente para evitar el
de rotor principal se clasifica según la exceso de movimiento de vaivén
forma en que la palas se mueven con alrededor de la bisagra de arrastre. El
relación al eje del rotor principal. Hay propósito de la bisagra de arrastre y los
tres clasificaciones básicas: totalmente amortiguadores, es compensar la
articulada, semi rígido o rígido. Algunos aceleración y desaceleración causada
sistemas de rotor modernas utilizar una por el Efecto Coriolis.
combinación de estos tipos.
Sistema rotor semirígido (basculante)
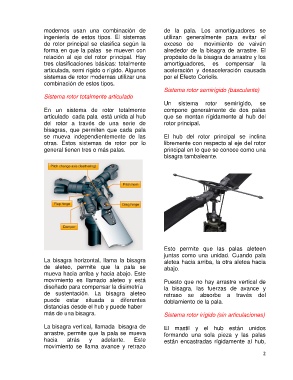
Sistema rotor totalmente articulado
Un sistema rotor semirígido, se
En un sistema de rotor totalmente compone generalmente de dos palas
articulado cada pala está unida al hub que se montan rígidamente al hub del
del rotor a través de una serie de rotor principal.
bisagras, que permiten que cada pala
se mueva independientemente de las El hub del rotor principal se inclina
otras. Estos sistemas de rotor por lo libremente con respecto al eje del rotor
general tienen tres o más palas. principal en lo que se conoce como una
bisagra tambaleante.
Esto permite que las palas aleteen
juntas como una unidad. Cuando pala
La bisagra horizontal, llama la bisagra aletea hacia arriba, la otra aletea hacia
de aleteo, permite que la pala se abajo.
mueva hacia arriba y hacia abajo. Este
movimiento es llamado aleteo y está Puesto que no hay arrastre vertical de
diseñado para compensar la disimetría la bisagra, las fuerzas de avance y
de sustentación. La bisagra aleteo retraso se absorbe a través del
puede estar situada a diferentes doblamiento de la pala.
distancias desde el hub y puede haber
más de una bisagra. Sistema rotor irígido (sin articulaciones)
La bisagra vertical, llamada bisagra de El mastil y el hub están unidos
arrastre, permite que la pala se mueva formando una sola pieza y las palas
hacia atrás y adelante. Este están encastradas rígidamente al hub,
movimiento se llama avance y retrazo
2