
Page 85 - 高中生活AI大智慧-電子書_Neat
P. 85
若我們想要讓智慧機器人能夠在指定的場合,準確並迅速完成的
任務,首先必須對環境進行感知以理解周遭情況,同時接收來自使用
者的資訊或是指令,接著便是任務的分析與執行內容規劃。機器人透
過人機互動介面或是外部感測器取得的訊號進行分析,歸類到對應的
控制命令並訂定目標,並且規劃出應執行的動作以及行動的路線,最
後在分析完任務後,交由硬體的控制系統進行任務中的動作控制,讓
機器人能循著規劃好的動作與動線移動,如圖 4-6。
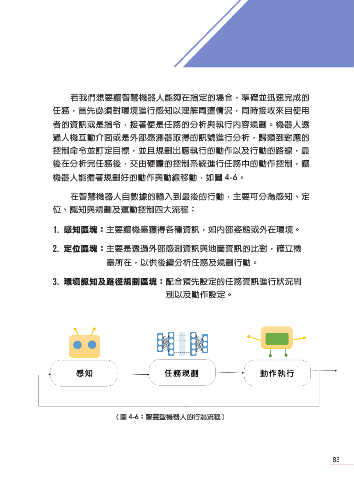
在智慧機器人自數據的輸入到最後的行動,主要可分為感知、定
位、認知與規劃及運動控制四大流程:
1. 感知區塊:主要讓機臺獲得各種資訊,如內部姿態或外在環境。
2. 定位區塊:主要是透過外部感測資訊與地圖資訊的比對,確立機
臺所在,以供後續分析任務及規劃行動。
3. 環境認知及路徑規劃區塊:配合預先設定的任務資訊進行狀況判
別以及動作設定。
(圖 4-6:智慧型機器人的行為流程)
83