
Page 21 - ArduinoและPOP-BOT
P. 21
21
หุ นยนต POP-BOT เป นหุ นยนต อั ตโนมั ติ ขนาดเล็ กที่ ควบคุ มด วยไมโครคอนโทรลเลอร AVR เบอร ATmega168
โดยใช โมดู ล POP-MCU ซึ่ งสามารถสร างขึ้ นจากอุ ปกรณ และชิ้ นส วนจํ านวนไม มาก แต รองรั บความต องการในการเรี ยน
รู ได อย างครบถ วนรอบด าน ไม ว าจะเป นการควบคุ มมอเตอร ไฟตรงเพื่ อขั บเคลื่ อนหุ นยนต ในลั กษณะต างๆ ทางเคลื่ อนที่
ตรง ถอยหลั ง หมุ นตั ว เลี้ ยวซ ายและขวา การอ านค าจากตั วตรวจจั บชนิ ดต างๆ ทั้ งแบบดิ จิ ตอลและอะนาลอกเพื่ อนํ ามาใช
ประกอบการตั ดสิ นใจในการทํ างานภายใต ภาวะเงื่ อนไขต างๆ การติ ดต อกั บอุ ปกรณ แสดงผลอย างโมดู ล LCD
ในบทนี้ นํ าเสนอการประกอบตั วหุ นยนต POP-BOT แบบมาตรฐาน และจะใช โครงสร างนี้ เป นหลั กในการเขี ยน
โปรแกรมเพื่ อควบคุ มการทํ างาน อย างไรก็ ตาม ผู สร างสามารถดั ดแปลงให แตกต างออกไปได หากแต เมื่ อนํ ามาเขี ยน
โปรแกรมจะต องคํ านึ งถึ งผลของการดั ดแปลงทางโครงสร างที่ มี ต อการทํ างานของตั วตรวจจั บและโปรแกรมด วย
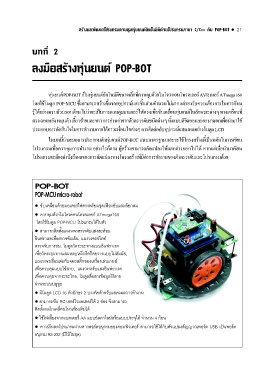
POP-BOT
POP-MCU micro-robot
ขั บเคลื่ อนด วยมอเตอร ไฟตรงพร อมชุ ดเฟ องขั บและล อกลม
ควบคุ มด วยไมโครคอนโทรลเลอร ATmega168
โดยใช โมดู ล POP-MCU โปรแกรมได ในตั ว
สามารถติ ดตั้ งแผงวงจรตรวจจั บแสงสะท อน
อิ นฟราเรดเพื่ อตรวจจั บเส น, แผงวงจรสวิ ตช
ตรวจจั บการชน, โมดู ลวั ดระยะทางแบบอิ นฟราเรด
เพื่ อวั ดระยะทางและหลบหลี กสิ่ งกี ดขวางแบบไม สั มผั ส,
แผงวงจรเชื่ อมต อกั บจอยสติ๊ กของเครื่ องเล นเกมส
เพื่ อควบคุ มแบบใช สาย, แผงวงจรรั บแสงอิ นฟราเรด
เพื่ อควบคุ มจากระยะไกล, โมดู ลสื่ อสารข อมู ลไร สาย
ผ านระบบบลู ทู ธ
มี โมดู ล LCD 16 ตั วอั กษร 2 บรรทั ดสํ าหรั บแสดงผลการทํ างาน
สามารถขั บ RC เซอร โวมอเตอร ได 2 ช อง จึ งสามารถ
ติ ดตั้ งกลไกเคลื่ อนไหวเพิ่ มเติ มได
ใช ไฟเลี้ ยงจากแบตเตอรี่ AA แบบอั ลคาไลน หรื อแบบประจุ ได จํ านวน 4 ก อน
ดาวน โหลดโปรแกรมผ านทางพอร ตอนุ กรมของคอมพิ วเตอร สามารถใช ได กั บตั วแปลงสั ญญาณพอร ต USB เป นพอร ต
อนุ กรม RS-232 (มี ให ในชุ ด)