
Page 16 - ArduinoและPOP-BOT
P. 16
16
1.5 ข อมู ลของสายสั ญญาณที่ ใช ในชุ ดหุ นยนต POP-BOT
1.5.1 สาย JST3AA-8 : สายเชื่ อมต อระหว างแผงวงจร
สาย JST3AA-8 ใช เชื่ อมต อระหว างแผงวงจรควบคุ ม RBX-168 กั บแผงวงจรตรวจจั บและแผงวงจรอุ ปกรณ
ต างๆ เป นสายแพ 3 เส น ยาว 8 นิ้ ว ปลายสายทั้ งสองด านติ ดตั้ งคอนเน็ กเตอร แบบ JST 3 ขา ตั วเมี ย ระยะห างระหว าง
ขา 2 มิ ลลิ เมตร มี การจั ดขาดั งนี้
ระยะหางระหวางขา 2 มม. ระยะหางระหวางขา 2 มม.
GND
S
+5V
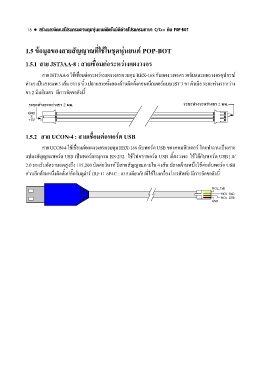
1.5.2 สาย UCON-4 : สายเชื่ อมต อพอร ต USB
สาย UCON-4 ใช เชื่ อมต อแผงวงจรควบคุ ม RBX-168 กั บพอร ต USB ของคอมพิ วเตอร โดยทํ างานเป นสาย
แปลงสั ญญาณพอร ต USB เป นพอร ตอนุ กรม RS-232 ใช ไฟจากพอร ต USB เลี้ ยงวงจร ใช ได กั บพอร ต USB1.0/
2.0 รองรั บอั ตราบอดสู งถึ ง 115,200 บิ ตต อวิ นาท ี มี สายสั ญญาณภายใน 4 เส น ปลายด านหนึ่ งใช ต อกั บพอร ต USB
ส วนอี กด านหนึ่ งติ ดตั้ งปลั๊ กโมดู ล าร (RJ-11 6P4C : แบบเดี ยวกั บที่ ใช ในเครื่ องโทรศั พท ) มี การจั ดขาดั งนี้
MCU_TxD
MCU_RxD
MCU_DTR
GND