
Page 15 - ArduinoและPOP-BOT
P. 15
15
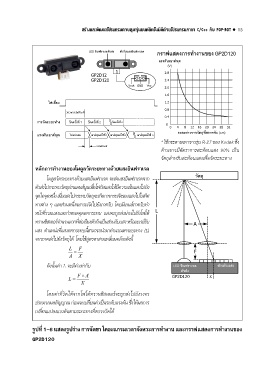
กราฟแสดงการทํ างานของ GP2D120
LED อินฟราเรดตัวสง ตัวรับแสงอินฟราเรด
แรงดันเอาตพุต
(V)
2.8
GP2D12
GP2D120 2.4
Vout GND Vcc
2.0
1.6
ไฟเลี้ยง 1.2
0.8
38.3ฑ9.6 มิลลิวินาที
0.4
การวัดระยะหาง วัดครั้งที่ 1 วัดครั้งที่ 2 วัดครั้งที่ n
0
0 4 8 12 16 20 24 28 32
ระยะหางจากวัตถุที่ตรวจจับ (cm)
แรงดันเอาตพุต ไมแนนอน เอาตพุตครั้งที่ 1 เอาตพุตครั้งที่ 2 เอาตพุตครั้งที่ n
* ใช กระดาษเทาขาวรุ น R-27 ของ Kodak ซึ่ ง
5 มิลลิวินาที
ด านขาวมี อั ตราการสะท อนแสง 90% เป น
วั ตถุ สํ าหรั บสะท อนแสงเพื่ อวั ดระยะทาง
หลั กการทํ างานของโมดู ลวั ดระยะทางด วยแสงอิ นฟราเรด
โมดู ลวั ดระยะทางด วยแสงอิ นฟราเรด จะส งแสงอิ นฟราเรดจาก วัตถุ
ตั วส งไปกระทบวั ตถุ ผ านเลนส นู นเพื่ อโฟกั สแสงให มี ความเข มแสงไปยั ง
จุ ดใดจุ ดหนึ่ ง เมื่ อแสงไปกระทบวั ตถุ จะเกิ ดการกระเจิ งของแสงไปในทิ ศ
ทางต าง ๆ แสงส วนหนึ่ งจะกระเจิ งไปยั งภาครั บ โดยมี เลนส ภาครั บทํ า
หน าที่ รวมแสงและกํ าหนดจุ ดตกกระทบ แสงจะถู กส งผ านไปยั งโฟโต L
ทรานซิ สเตอร จํ านวนมากที่ ต อเรี ยงตั วกั นเป นส วนรั บแสง หรื ออะเรย รั บ A
แสง ตํ าแหน งที่ แสงตกกระทบนี้ สามารถนํ ามาคํ านวณหาระยะทาง (L)
จากภาคส งไปยั งวั ตถุ ได โดยใช สู ตรหาสามเหลี่ ยมคล ายดั งนี้
L F
F
A X
ดั งนั้ นค า L จะมี ค าเท ากั บ LED อินฟราเรด สวนรับแสง
ตัวสง
F A GP2D120 X
L
X
โดยค าที่ วั ดได จากโฟโต ทรานซิ สเตอร จะถู กส งไปยั งวงจร
ประมวลผลสั ญญาณ ก อนจะเปลี่ ยนค าเป นระดั บแรงดั น ซึ่ งให ผลการ
เปลี่ ยนแปลงแรงดั นตามระยะทางที่ ตรวจวั ดได
รู ปที่ 1-6 แสดงรู ปร าง การจั ดขา ไดอะแกรมเวลาจั งหวะการทํ างาน และกราฟแสดงการทํ างานของ
GP2D120