
Page 409 - Mechatronics with Experiments
P. 409
Printer: Yet to Come
October 9, 2014 8:1
JWST499-c06
JWST499-Cetinkunt
SENSORS 395 254mm×178mm
Other Signal Signal Sensing
machinary processing conversion device object
"The brain" "Nerve system" "Eyes"
Signal processing Light
computer Digitazer O O O O source
n
0 2 levels O Surrounding
(n-bit!) Reflected
Trigger O environment
commands Input Image data light
Data Object
Report Output 001010...
Sync. signals iα Light
Commands
Take picture O O O O
set parameters
i α Light
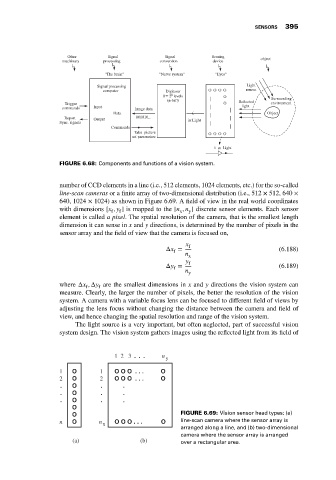
FIGURE 6.68: Components and functions of a vision system.
number of CCD elements in a line (i.e., 512 elements, 1024 elements, etc.) for the so-called
line-scan cameras or a finite array of two-dimensional distribution (i.e., 512 × 512, 640 ×
640, 1024 × 1024) as shown in Figure 6.69. A field of view in the real world coordinates
with dimensions [x , y ] is mapped to the [n , n ] discrete sensor elements. Each sensor
f
f
x
y
element is called a pixel. The spatial resolution of the camera, that is the smallest length
dimension it can sense in x and y directions, is determined by the number of pixels in the
sensor array and the field of view that the camera is focused on,
x f
Δx = (6.188)
f
n x
y f
Δy = (6.189)
f
n y
where Δx , Δy are the smallest dimensions in x and y directions the vision system can
f
f
measure. Clearly, the larger the number of pixels, the better the resolution of the vision
system. A camera with a variable focus lens can be focused to different field of views by
adjusting the lens focus without changing the distance between the camera and field of
view, and hence changing the spatial resolution and range of the vision system.
The light source is a very important, but often neglected, part of successful vision
system design. The vision system gathers images using the reflected light from its field of
1 2 3 . . . n y
1 O 1 O O O . . . O
2 O 2 O O O . . . O
. O . .
. O . .
. O . .
O
O FIGURE 6.69: Vision sensor head types: (a)
n O n x O O O . . . O line-scan camera where the sensor array is
arranged along a line, and (b) two-dimensional
camera where the sensor array is arranged
(a) (b) over a rectangular area.