
Page 434 - Mechatronics with Experiments
P. 434
JWST499-Cetinkunt
JWST499-c07
420 MECHATRONICS Printer: Yet to Come October 9, 2014 8:41 254mm×178mm
Reservoir
Load
X
2
Operator handle
Check
valve 1
X F = p A 1
1 1 Cylinder
.
Q = x A Check F = p A 2
2
1 1 1 valve 2
Q = x A
.
(a) 2 2 2
= Q 1
A
x = 1 x
2 A 1
Resevoir 2
Electric
motor
M Pump
Operator handle
Relief
valve
Control
valve
Load
Cylinder
(b)
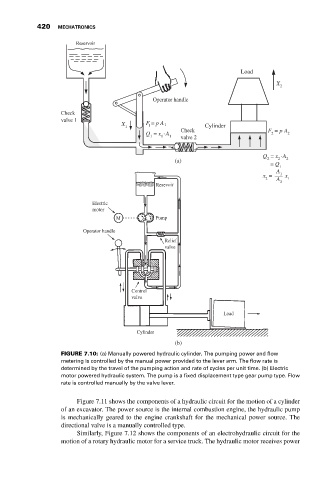
FIGURE 7.10: (a) Manually powered hydraulic cylinder. The pumping power and flow
metering is controlled by the manual power provided to the lever arm. The flow rate is
determined by the travel of the pumping action and rate of cycles per unit time. (b) Electric
motor powered hydraulic system. The pump is a fixed displacement type gear pump type. Flow
rate is controlled manually by the valve lever.
Figure 7.11 shows the components of a hydraulic circuit for the motion of a cylinder
of an excavator. The power source is the internal combustion engine, the hydraulic pump
is mechanically geared to the engine crankshaft for the mechanical power source. The
directional valve is a manually controlled type.
Similarly, Figure 7.12 shows the components of an electrohydraulic circuit for the
motion of a rotary hydraulic motor for a service truck. The hydraulic motor receives power