
Page 224 - Servo Motors and Industrial Control Theory -
P. 224
222 Appendix C
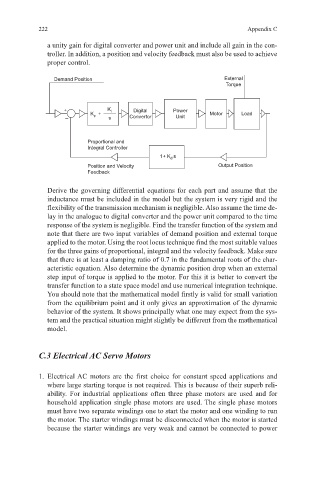
a unity gain for digital converter and power unit and include all gain in the con-
troller. In addition, a position and velocity feedback must also be used to achieve
proper control.
Demand Position External
Torque
+ K + K i Digital Power Motor Load
– p s Convertor Unit
Proportional and
Integral Controller
1+ K s
d
Position and Velocity Output Position
Feedback
Derive the governing differential equations for each part and assume that the
inductance must be included in the model but the system is very rigid and the
flexibility of the transmission mechanism is negligible. Also assume the time de-
lay in the analogue to digital converter and the power unit compared to the time
response of the system is negligible. Find the transfer function of the system and
note that there are two input variables of demand position and external torque
applied to the motor. Using the root locus technique find the most suitable values
for the three gains of proportional, integral and the velocity feedback. Make sure
that there is at least a damping ratio of 0.7 in the fundamental roots of the char-
acteristic equation. Also determine the dynamic position drop when an external
step input of torque is applied to the motor. For this it is better to convert the
transfer function to a state space model and use numerical integration technique.
You should note that the mathematical model firstly is valid for small variation
from the equilibrium point and it only gives an approximation of the dynamic
behavior of the system. It shows principally what one may expect from the sys-
tem and the practical situation might slightly be different from the mathematical
model.
C.3 Electrical AC Servo Motors
1. Electrical AC motors are the first choice for constant speed applications and
where large starting torque is not required. This is because of their superb reli-
ability. For industrial applications often three phase motors are used and for
household application single phase motors are used. The single phase motors
must have two separate windings one to start the motor and one winding to run
the motor. The starter windings must be disconnected when the motor is started
because the starter windings are very weak and cannot be connected to power