
Page 38 - Introducción a Robótica
P. 38
Percepci´ on
Introducci´ on a Filtro de Kalman Inferencia
Rob´ otica
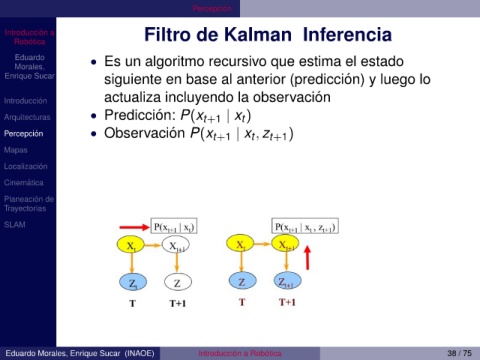
Eduardo • Es un algoritmo recursivo que estima el estado
Morales,
Enrique Sucar
siguiente en base al anterior (predicci´ on) y luego lo
actualiza incluyendo la observaci´ on
Introducci´ on
Arquitecturas • Predicci´ on: P(x t+1 | x t )
Percepci´ on • Observaci´ on P(x t+1 | x t , z t+1 )
Mapas
Localizaci´ on
Cinem´ atica
Planeaci´ on de
Trayectorias
SLAM
Eduardo Morales, Enrique Sucar (INAOE) Introducci´ on a Rob´ otica 38 / 75