
Page 408 - Programmable Logic Controllers, Fifth Edition - Mobile version
P. 408
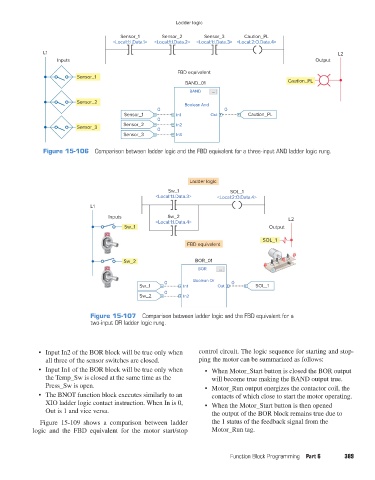
Ladder logic
Sensor_1 Sensor_2 Sensor_3 Caution_PL
<Local:1:I.Data.1> <Local:1:I.Data.2> <Local:1:I.Data.3> <Local:2:O.Data.4>
L1 L2
Inputs Output
FBD equivalent
Sensor_1
BAND_01 Caution_PL
BAND ...
Sensor_2
Boolean And
0 0
Sensor_1 In1 Out Caution_PL
0
Sensor_2 In2
Sensor_3
0
Sensor_3 In3
Figure 15-106 Comparison between ladder logic and the FBD equivalent for a three-input AND ladder logic rung.
Ladder logic
Sw_1 SOL_1
<Local:1:I.Data.3> <Local:2:O.Data.4>
L1
Inputs Sw_2 L2
<Local:1:I.Data.4>
Sw_1 Output
SOL_1
FBD equivalent
Sw_2 BOR_01
BOR ...
0 Boolean Or 0
Sw_1 In1 Out SOL_1
0
Sw_2 In2
Figure 15-107 Comparison between ladder logic and the FBD equivalent for a
two-input OR ladder logic rung.
• Input In2 of the BOR block will be true only when control circuit. The logic sequence for starting and stop-
all three of the sensor switches are closed. ping the motor can be summarized as follows:
• Input In1 of the BOR block will be true only when • When Motor_Start button is closed the BOR output
the Temp_Sw is closed at the same time as the will become true making the BAND output true.
Press_Sw is open. • Motor_Run output energizes the contactor coil, the
• The BNOT function block executes similarly to an contacts of which close to start the motor operating.
XIO ladder logic contact instruction. When In is 0, • When the Motor_Start button is then opened
Out is 1 and vice versa. the output of the BOR block remains true due to
Figure 15-109 shows a comparison between ladder the 1 status of the feedback signal from the
logic and the FBD equivalent for the motor start/stop Motor_Run tag.
Function Block Programming Part 6 389
pet73842_ch15_333-394.indd 389 03/11/15 7:34 PM