
Page 66 - Conocimientos generales y especificos de los RPAS
P. 66
Piloto de RPAS - 63
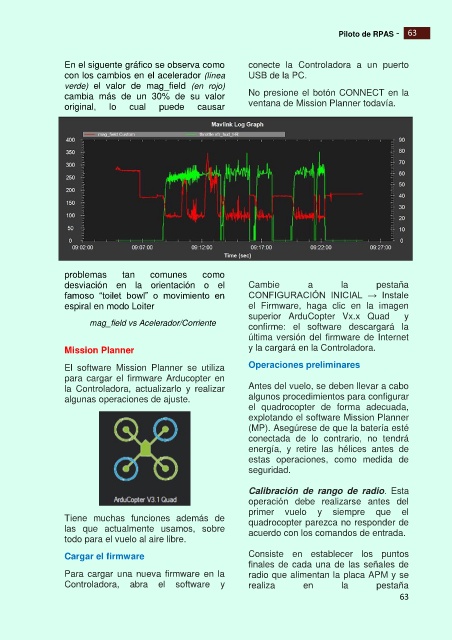
En el siguente gráfico se observa como conecte la Controladora a un puerto
con los cambios en el acelerador (línea USB de la PC.
verde) el valor de mag_field (en rojo)
cambia más de un 30% de su valor No presione el botón CONNECT en la
original, lo cual puede causar ventana de Mission Planner todavía.
problemas tan comunes como
desviación en la orientación o el Cambie a la pestaña
famoso “toilet bowl” o movimiento en CONFIGURACIÓN INICIAL → Instale
espiral en modo Loiter el Firmware, haga clic en la imagen
superior ArduCopter Vx.x Quad y
mag_field vs Acelerador/Corriente confirme: el software descargará la
última versión del firmware de Internet
Mission Planner y la cargará en la Controladora.
El software Mission Planner se utiliza Operaciones preliminares
para cargar el firmware Arducopter en
la Controladora, actualizarlo y realizar Antes del vuelo, se deben llevar a cabo
algunas operaciones de ajuste. algunos procedimientos para configurar
el quadrocopter de forma adecuada,
explotando el software Mission Planner
(MP). Asegúrese de que la batería esté
conectada de lo contrario, no tendrá
energía, y retire las hélices antes de
estas operaciones, como medida de
seguridad.
Calibración de rango de radio. Esta
operación debe realizarse antes del
primer vuelo y siempre que el
Tiene muchas funciones además de quadrocopter parezca no responder de
las que actualmente usamos, sobre acuerdo con los comandos de entrada.
todo para el vuelo al aire libre.
Cargar el firmware Consiste en establecer los puntos
finales de cada una de las señales de
Para cargar una nueva firmware en la radio que alimentan la placa APM y se
Controladora, abra el software y realiza en la pestaña
63