
Page 124 - Computer Graphics Handout
P. 124
3.10.2 General Rotation
We now show that an arbitrary rotation about the origin can be composed of three successive rotations about the three axes. The
order is not unique (see Exercise 3.10), although the resulting rotation matrix is. We form the desired matrix by first doing a rotation
about the z-axis, then doing a rotation about the y-axis, and concluding with a rotation about the x-axis.
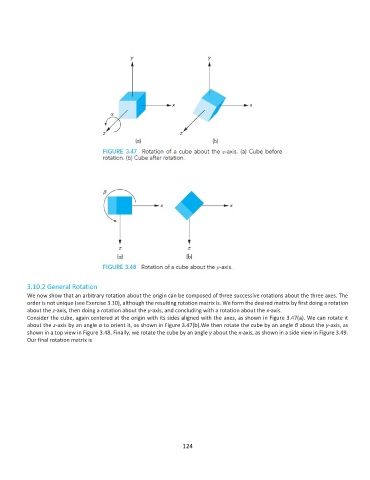
Consider the cube, again centered at the origin with its sides aligned with the axes, as shown in Figure 3.47(a). We can rotate it
about the z-axis by an angle α to orient it, as shown in Figure 3.47(b).We then rotate the cube by an angle β about the y-axis, as
shown in a top view in Figure 3.48. Finally, we rotate the cube by an angle γ about the x-axis, as shown in a side view in Figure 3.49.
Our final rotation matrix is
124