
Page 30 - Conocimientos generales y especificos de los RPAS
P. 30
Piloto de RPAS - 27
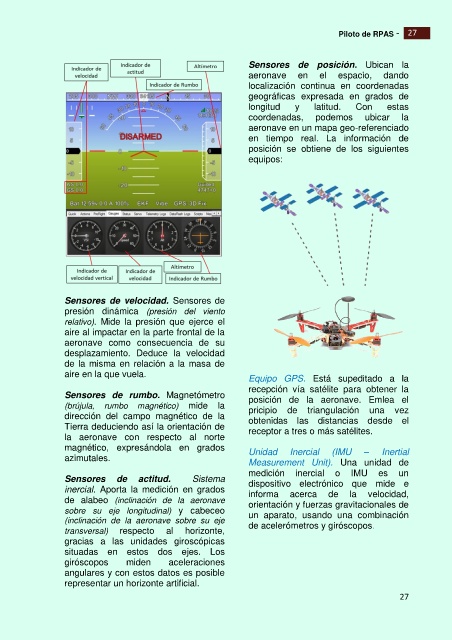
Sensores de posición. Ubican la
aeronave en el espacio, dando
localización continua en coordenadas
geográficas expresada en grados de
longitud y latitud. Con estas
coordenadas, podemos ubicar la
aeronave en un mapa geo-referenciado
en tiempo real. La información de
posición se obtiene de los siguientes
equipos:
Sensores de velocidad. Sensores de
presión dinámica (presión del viento
relativo). Mide la presión que ejerce el
aire al impactar en la parte frontal de la
aeronave como consecuencia de su
desplazamiento. Deduce la velocidad
de la misma en relación a la masa de
aire en la que vuela. Equipo GPS. Está supeditado a la
recepción vía satélite para obtener la
Sensores de rumbo. Magnetómetro posición de la aeronave. Emlea el
(brújula, rumbo magnético) mide la pricipio de triangulación una vez
dirección del campo magnético de la obtenidas las distancias desde el
Tierra deduciendo así la orientación de receptor a tres o más satélites.
la aeronave con respecto al norte
magnético, expresándola en grados Unidad Inercial (IMU – Inertial
azimutales. Measurement Unit). Una unidad de
medición inercial o IMU es un
Sensores de actitud. Sistema dispositivo electrónico que mide e
inercial. Aporta la medición en grados informa acerca de la velocidad,
de alabeo (inclinación de la aeronave orientación y fuerzas gravitacionales de
sobre su eje longitudinal) y cabeceo un aparato, usando una combinación
(inclinación de la aeronave sobre su eje de acelerómetros y giróscopos.
transversal) respecto al horizonte,
gracias a las unidades giroscópicas
situadas en estos dos ejes. Los
giróscopos miden aceleraciones
angulares y con estos datos es posible
representar un horizonte artificial.
27