
Page 31 - Conocimientos generales y especificos de los RPAS
P. 31
Piloto de RPAS - 28
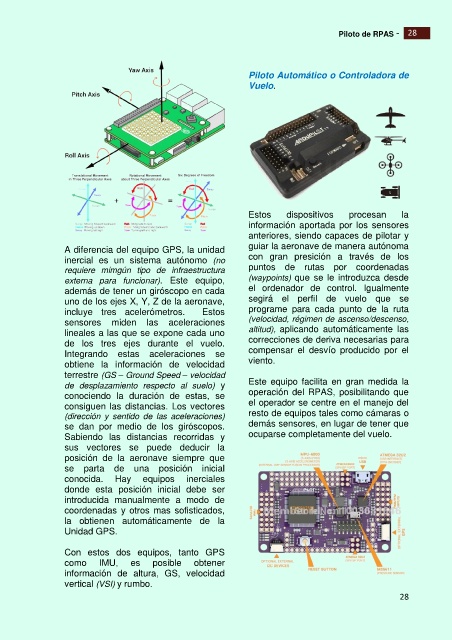
Piloto Automático o Controladora de
Vuelo.
Estos dispositivos procesan la
información aportada por los sensores
anteriores, siendo capaces de pilotar y
A diferencia del equipo GPS, la unidad guiar la aeronave de manera autónoma
inercial es un sistema autónomo (no con gran presición a través de los
requiere mimgún tipo de infraestructura puntos de rutas por coordenadas
externa para funcionar). Este equipo, (waypoints) que se le introduzca desde
además de tener un giróscopo en cada el ordenador de control. Igualmente
uno de los ejes X, Y, Z de la aeronave, segirá el perfil de vuelo que se
incluye tres acelerómetros. Estos programe para cada punto de la ruta
sensores miden las aceleraciones (velocidad, régimen de ascenso/descenso,
lineales a las que se expone cada uno altitud), aplicando automáticamente las
de los tres ejes durante el vuelo. correcciones de deriva necesarias para
Integrando estas aceleraciones se compensar el desvío producido por el
obtiene la información de velocidad viento.
terrestre (GS – Ground Speed – velocidad
de desplazamiento respecto al suelo) y Este equipo facilita en gran medida la
conociendo la duración de estas, se operación del RPAS, posibilitando que
consiguen las distancias. Los vectores el operador se centre en el manejo del
(dirección y sentido de las aceleraciones) resto de equipos tales como cámaras o
se dan por medio de los giróscopos. demás sensores, en lugar de tener que
Sabiendo las distancias recorridas y ocuparse completamente del vuelo.
sus vectores se puede deducir la
posición de la aeronave siempre que
se parta de una posición inicial
conocida. Hay equipos inerciales
donde esta posición inicial debe ser
introducida manualmente a modo de
coordenadas y otros mas sofisticados,
la obtienen automáticamente de la
Unidad GPS.
Con estos dos equipos, tanto GPS
como IMU, es posible obtener
información de altura, GS, velocidad
vertical (VSI) y rumbo.
28