
Page 59 - sadasd
P. 59
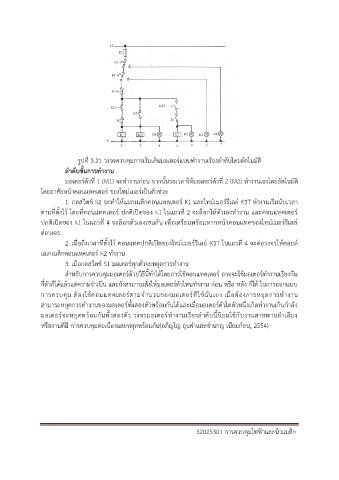
รูปที่ 3.21 วงจรควบคุมการเริ่มเดินมอเตอร์แบบท างานเรียงล าดับโดยอัตโนมัติ
ล ำดับขั้นกำรท ำงำน
มอเตอร์ตัวที่ 1 (M1) จะท างานก่อน จากนั้นรอเวลาให้มอเตอร์ตัวที่ 2 (M2) ท างานเองโดยอัตโนมัติ
โดยอาศัยหน้าคอนแทคเตอร์ ของไทม์เมอร์เป็นตัวช่วย
ิ
1. กดสวตช S2 จะท าให้แมกเนติกคอนแทคเตอร์ K1 และไทม์เมอร์รีเลย์ K3T ท างานเริ่มนับเวลา
์
้
ตามที่ตั้งไว โดยที่คอนแทคเตอร์ ปกติเปิดของ K1 ในแถวที่ 2 จะล็อกให้ตัวเองท างาน และคอนแทคเตอร์
ปกติเปิดของ K1 ในแถวที่ 4 จะล็อกตัวเองเชนกัน เพื่อเตรียมพร้อมหากหน้าคอนแทคของไทม์เมอร์รีเลย์
่
ต่อวงจร
ึ
้
2. เมื่อถงเวลาที่ตั้งไว คอนแทคปกติเปิดของไทม์เมอร์รีเลย์ K3T ในแถวที่ 4 จะต่อวงจรให้คอยล์
แมกเนติกคอนแทคเตอร์ K2 ท างาน
3. เมื่อกดสวิตช์ S1 มอเตอร์ทุกตัวจะหยุดการท างาน
ส าหรับการควบคุมมอเตอร์ด้วยวธีนี้ท าได้โดยการใช้คอนแทคเตอร์ อาจจะใช้มอเตอร์ท างานเรียงกัน
ิ
กี่ตัวก็ได้แล้วแต่ความจ าเป็น และยังสามารถสั่งให้มอเตอร์ตัวไหนท างาน ก่อน หรือ หลัง ก็ได้ ในการออกแบบ
ุ
การควบคม ต้องใชคอนแทคเตอร์ตามจ านวนของมอเตอร์ที่ใชนั่นเอง เมื่อต้องการหยุดการท างาน
้
้
สามารถหยุดการท างานของมอเตอร์ทั้งสองตัวพร้อมกันได้และเมื่อมอเตอร์ตัวใดตัวหนึ่งเกิดท างานเกินก าลัง
มอเตอร์จะหยุดพร้อมกันทั้งสองตัว วงจรมอเตอร์ท างานเรียงล าดับนี้นิยมใชกับงานสายพานล าเลียง
้
หรืองานที่มี การควบคุมต่อเนื่องและหยุดพร้อมกัน(อภิญโญ อุ่นค าและช านาญ เนียมก้อน, 2554)
32025301 การควบคุมไฟฟ้าและนิวแมติก