
Page 93 - MODUL DARING SISTEM PENGATURAN_Neat
P. 93
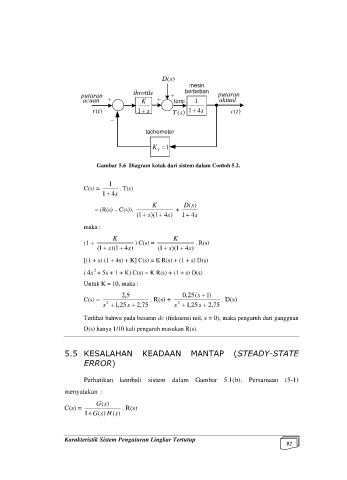
D (s )
mesin
throttle berbeban
putaran + putaran
acuan + K + torsi 1 aktual
r (t ) 1 + s T (s ) 1+ s 4 c (t )
−
tachometer
K T = 1
Gambar 5.6 Diagram kotak dari sistem dalam Contoh 5.2.
1
C(s) = . T(s)
1+ s 4
K D( s)
= (R(s) – C(s)). +
1 ( + s )( 1+ 4s ) 1+ s 4
maka :
K K
(1 + ) C(s) = . R(s)
1 ( + s )( 1+ 4s ) 1 ( + s )( 1+ 4s )
[(1 + s) (1 + 4s) + K] C(s) = K R(s) + (1 + s) D(s)
2
( 4s + 5s + 1 + K) C(s) = K R(s) + (1 + s) D(s)
Untuk K = 10, maka :
s
5 , 2 , 0 25 ( + ) 1
C(s) = . R(s) + . D(s)
s 2 + , 1 25 + , 2 75 s 2 + , 1 25 + , 2 75
s
s
Terlihat bahwa pada besaran dc (frekuensi nol, s = 0), maka pengaruh dari gangguan
D(s) hanya 1/10 kali pengaruh masukan R(s).
5.5 KESALAHAN KEADAAN MANTAP (STEADY-STATE
ERROR)
Perhatikan kembali sistem dalam Gambar 5.1(b). Persamaan (5-1)
menyatakan :
G (s )
C(s) = . R(s)
+
1 G (s ) H (s )
Karakteristik Sistem Pengaturan Lingkar Tertutup
92