
Page 45 - Conocimientos generales y especificos de los RPAS
P. 45
Piloto de RPAS - 42
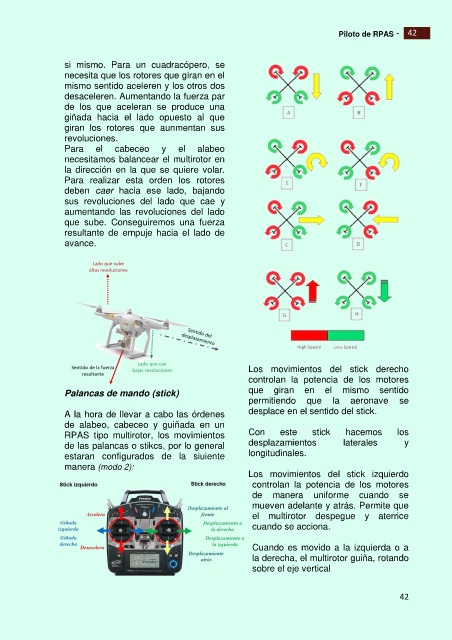
si mismo. Para un cuadracópero, se
necesita que los rotores que giran en el
mismo sentido aceleren y los otros dos
desaceleren. Aumentando la fuerza par
de los que aceleran se produce una
giñada hacia el lado opuesto al que
giran los rotores que aunmentan sus
revoluciones.
Para el cabeceo y el alabeo
necesitamos balancear el multirotor en
la dirección en la que se quiere volar.
Para realizar esta orden los rotores
deben caer hacia ese lado, bajando
sus revoluciones del lado que cae y
aumentando las revoluciones del lado
que sube. Conseguiremos una fuerza
resultante de empuje hacia el lado de
avance.
Los movimientos del stick derecho
controlan la potencia de los motores
Palancas de mando (stick) que giran en el mismo sentido
permitiendo que la aeronave se
A la hora de llevar a cabo las órdenes desplace en el sentido del stick.
de alabeo, cabeceo y guiñada en un
RPAS tipo multirotor, los movimientos Con este stick hacemos los
de las palancas o stikcs, por lo general desplazamientos laterales y
estaran configurados de la siuiente longitudinales.
manera (modo 2):
Los movimientos del stick izquierdo
controlan la potencia de los motores
de manera uniforme cuando se
mueven adelante y atrás. Permite que
el multirotor despegue y aterrice
cuando se acciona.
Cuando es movido a la izquierda o a
la derecha, el multirotor guiña, rotando
sobre el eje vertical
42