
Page 127 - 高中生活AI大智慧-電子書_Neat
P. 127
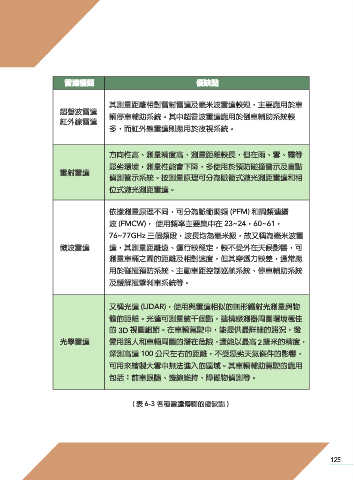
雷達種類 優缺點
其測量距離相對雷射雷達及毫米波雷達較短,主要應用於車
超聲波雷達 輛停車輔助系統。其中超音波雷達應用於倒車輔助系統較
紅外線雷達
多,而紅外線雷達則應用於夜視系統。
方向性高、測量精度高、測量距離較長,但在雨、雪、霧等
惡劣環境,測量性能會下降,多使用於預防碰撞警示及盲點
雷射雷達
偵測警示系統。按測量原理可分為脈衝式激光測距雷達和相
位式激光測距雷達。
依據測量原理不同,可分為脈衝調頻 (PFM) 和調頻連續
波 (FMCW), 使用頻率主要集中在 23~24,60~61,
76~77GHz 三個頻段,波長均為毫米級,故又稱為毫米波雷
微波雷達 達,其測量距離遠、運行較穩定,較不受外在天候影響,可
測量車輛之間的距離及相對速度,但其穿透力較差,通常應
用於碰撞預防系統、主動車距控制巡航系統、停車輔助系統
及緩解撞擊剎車系統等。
又稱光達 (LIDAR),使用與雷達相似的無形鐳射光測量與物
體的距離。光達可測量數千個點,建構感測器周圍環境極佳
的 3D 視圖細節。在車輛駕駛中,能提供最詳細的路況,發
光學雷達 覺用路人和車輛周圍的潛在危險,還能以最高 2 釐米的精度,
深測高達 100 公尺左右的距離,不受惡劣天氣條件的影響,
可用來繪製大雪中無法進入的區域。其車輛輔助駕駛的應用
包括:前車跟隨、邊線維持、障礙物偵測等。
( 表 6-3 各種雷達傳輸的優缺點 )
125