
Page 18 - тех.мех.Вереина.Л.И
P. 18
F{ = F„ = Fn9 а другая — равна, но направлена в противопо
ложную сторону: F"= -Fu...9F"= -Fn.
Теперь на тело действуют: система сходящихся сил F{, F{,..., F' и
система пар сил с моментами тх = mom ( / j , /j"), Щ = mom [F2, /?'),
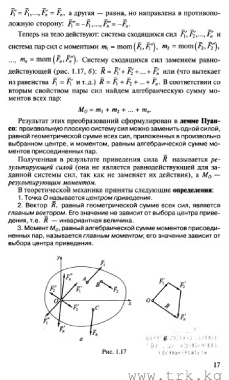
mn =mom(Fn,F"y Систему сходящихся сил заменяем равно
действующей (рис. 1.17, б): R = F{+ F{ +... + F„ или (что вытекает
из равенства Fx = F{ и т. д.) R = F} + F2 +... + Fn. В соответствии со
вторым свойством пары сил найдем алгебраическую сумму мо
ментов всех пар:
М0 = гп\ + т2 + ... + тп.
Результат этих преобразований сформулирован в лемме Пуан-
со: произвольную плоскую систему сил можно заменить одной силой,
равной геометрической сумме всех сил, приложенных в произвольно
выбранном центре, и моментом, равным алгебраической сумме мо
ментов присоединенных пар.
Полученная в результате приведения сила R называется ре
зультирующей силой (она не является равнодействующей для за
данной системы сил, так как не заменяет их действия), а М0 —
результирующим моментом.
В теоретической механике приняты следующие определения:
1. Точка О называется центром приведения.
2. Вектор R , равный геометрической сумме всех сил, является
главным вектором. Его значение не зависит от выбора центра приве
дения, т.е. R — инвариантная величина.
3. Момент М0, равный алгебраической сумме моментов присоеди
ненных пар, называется главным моментом; его значение зависит от
выбора центра приведения.
1 0 ■/ - ii < !■). НЗ!: Н1: К К
Рис. 1.17 | 01: У Н fa Ь :■ Н i: М11 1»
17
www.trk.kg