
Page 40 - тех.мех.Вереина.Л.И
P. 40
vz
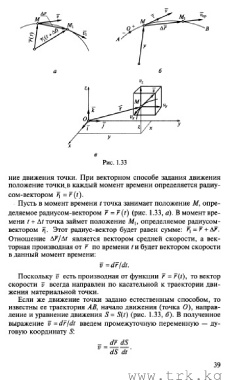
Рис. 1.33
ние движения точки. При векторном способе задания движения
положение точки,в каждый момент времени определяется радиу-
сом-вектором Ц = г (/).
Пусть в момент времени t точка занимает положение М, опре
деляемое радиусом-вектором г = г (t) (рис. 1.33, а). В момент вре
мени t + At точка займет положение Мь определяемое радиусом-
вектором г\. Этот радиус-вектор будет равен сумме: rx = r +А7.
Отношение A r / A t является вектором средней скорости, а век
торная производная от г по времени t и будет вектором скорости
в данный момент времени:
v =drldt.
Поскольку v есть производная от функции 7 = r { t ) , то вектор
скорости v всегда направлен по касательной к траектории дви
жения материальной точки.
Если же движение точки задано естественным способом, то
известны ее траектория А В , начало движения (точка О ) , направ
ление и уравнение движения S = S ( t ) (рис. 1.33, б ) . В полученное
выражение v = d r / d t введем промежуточную переменную — ду
говую координату S:
- = dr_dS_
V ~ dS d t'
39
www.trk.kg